
Parametric and vector-valued functions are a way of writing and graphing more complicated, and therefore more interesting, curves.
Up to now you have been studying functions where the y-coordinates are found evaluating an expression in terms of the x-coordinates. Parametric and vector equations define both the x– and y-coordinates of a curve in terms of a third variable called a parameter, usually represented by t.
The only difference between the parametric and vector representation is the notation. The parametric form gives two equations, one for x and one for y. For example:


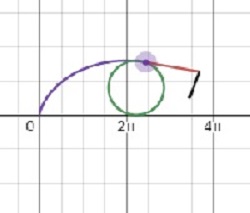
are the parametric equations of a curve called a prolate cycloid. It is the path of a point on the flange of a train wheel as it rolls along a straight track.
The vector form for this same curve is written:

Notice the two coordinates of the vector are the same as the parametric equations.
In BC calculus you will study parametric and vector-valued equations of motion, that is the path of a point moving according to the parametric and vector equation. Since things are moving, they have a velocity – a vector pulling the point in the direction it is moving at any instant. The velocity vector is tangent to the curve and its length is the speed at which the point is moving. Also, they have an acceleration – a vector pulling the velocity vector. These are found, as I hope you suspect, by differentiating. Vector-valued functions may also be integrated.
The illustration shows the path of a point on the flange of a train wheel rolling along a track. Notice that sometimes the point is moving backwards! The Position vector (from the origin to the point) is in black. Its endpoint is the point defined by the parametric or vector equations. The red vector is the velocity vector “pulling” the point to its next position. The green vector is the acceleration vector “pulling” the velocity vector.
While there are many other uses for parametric and vector-valued functions, the BC Calculus Exam only considers motion situations.
Course and Exam Description Unit 9, Sections 9.1 to 9.6. This is a BC only topic.
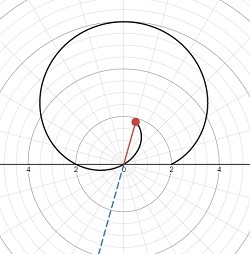
 , in radians between the ray and the polar axis. On the ray is a segment with a point at its end. This segment’s length is
, in radians between the ray and the polar axis. On the ray is a segment with a point at its end. This segment’s length is  . As you rotate the ray you can see the polar graph drawn. When
. As you rotate the ray you can see the polar graph drawn. When  the segment extend in the opposite direction from the ray.
the segment extend in the opposite direction from the ray. , for example
, for example 
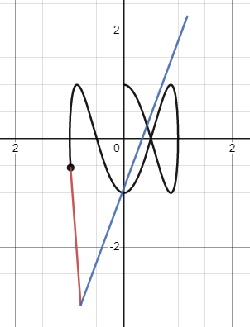
 , on the interior of the wheel (
, on the interior of the wheel ( ), or outside the wheel (
), or outside the wheel ( – think the flange on a train wheel). Use the “u” slider to animate the drawing. The velocity and acceleration vectors are shown; they may be turned off. The velocity vector is tangent to the curve (not to the circle) and seems to “pull” the point along the curve. The acceleration vector “pulls” the velocity vector. The equation in this demo should not be changed.
– think the flange on a train wheel). Use the “u” slider to animate the drawing. The velocity and acceleration vectors are shown; they may be turned off. The velocity vector is tangent to the curve (not to the circle) and seems to “pull” the point along the curve. The acceleration vector “pulls” the velocity vector. The equation in this demo should not be changed.